
|
虚短和虚断的概念 设计指标 输入直流电压(VIN):28V; 输出电压(VO):15V; 输出电流(IIN):5A; 基准电压(Vref):5V; 开关频率(fs):100kHz; 采样网络传递函数H(s)=5/15=1/3; 三角载波峰峰值Vm=4V。 Buck变换器主电路如图1所示: 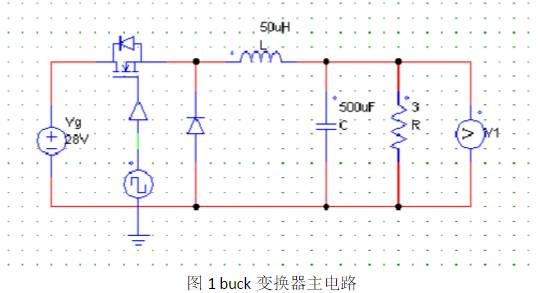 输出电压和输出电流仿真波形如图2: 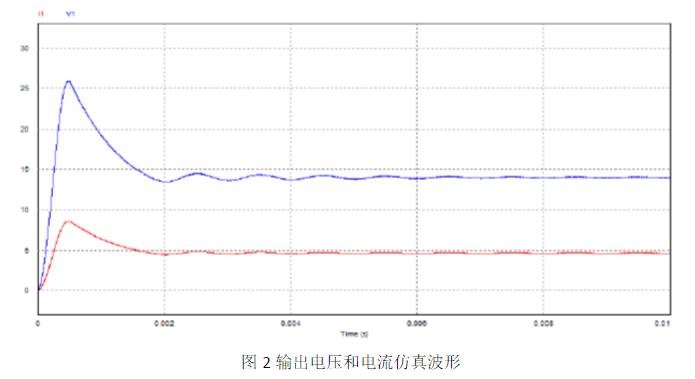 原始系统设计 (1)设计电压采样网络。在设计开关调节系统时,为消除稳态误差,在低频段,尤其在直流频率点,开环传递函数的幅值要远大于1,即在直流频率点系统为深度负反馈系统。对于深度负反馈系统,参考电压与输出电压之比等于电压采样网络的传递函数,即  (2)绘制原始系统的Bode图。加在PWM的锯齿波信号峰峰值为Vm=4V,采用小信号模型分析,给出Buck变换器传递函数T s 为:  交流小信号模型中电路参数计算如下: 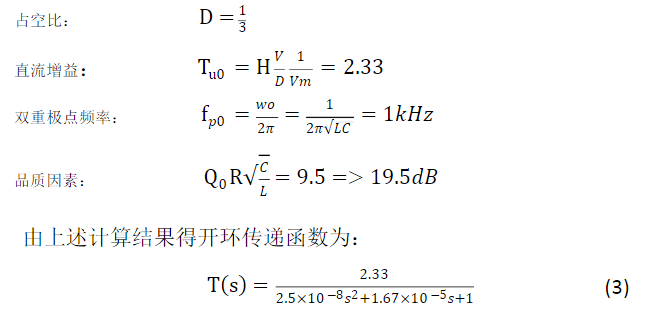 根据原始系统的传递函数可以得到的波特图如图3所示 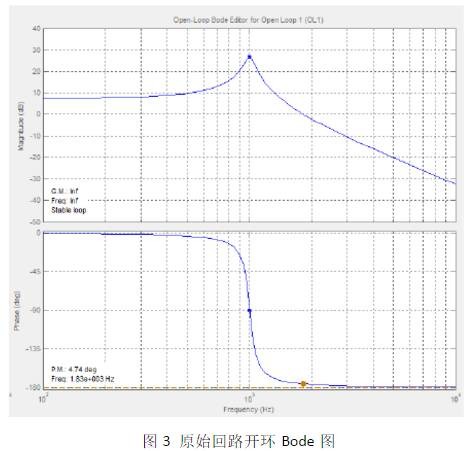 从图3中可以看出穿越频率为fc=1.83kHz,相位裕度为ψm=4.74,从表面上看,系统是稳定的,但是如果系统中的参数发生变化,系统可能会变得不稳定;另外穿越频率太低,系统的响应速度很慢。所以,要设计一个合理的补偿网络是系统能够稳定工作。 补偿网络的设计(使用SISOTOOL确定参数) 原始系统主要问题是相位裕度太低、穿越频率太低。改进的思路是在远低于穿越频率fc处,给补偿网络增加一个零点fZ,开环传递函数就会产生足够的超前相移,保证系统有足够的裕量;在大于零点频率的附近增加一个极点fP,并且为了克服稳态误差大的缺点,可以加入倒置零点fL,为此可以采用如图4所示的PID补偿网络。 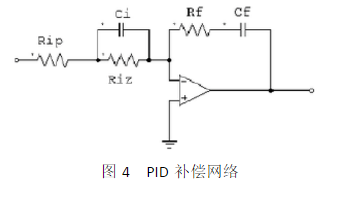 根据电路写出的PID补偿网络的传递函数为:  在此我们通过使用Matlab中SISOTOOL工具来设计调节器参数,可得: 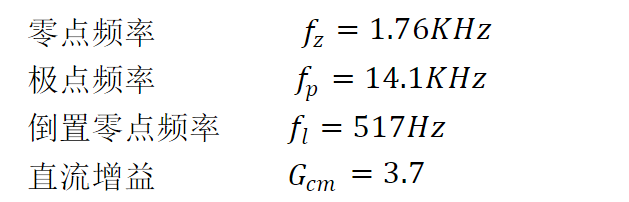 首先确定PD调节器的参数,按设计要求拖动添加零点与极点,所得参数如图5 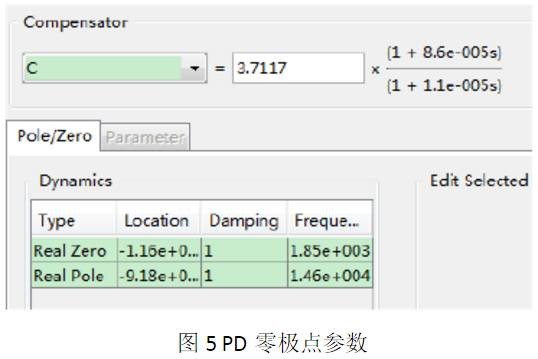 加入PD补偿器之后的开环Bode图,相频裕度为52度,穿越频率5KHz,如图6所示: 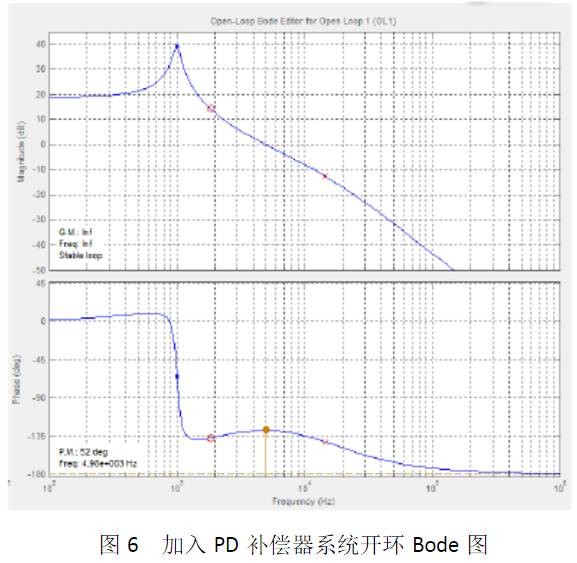 然后加入倒置零点,设计PID参数,如图7所示 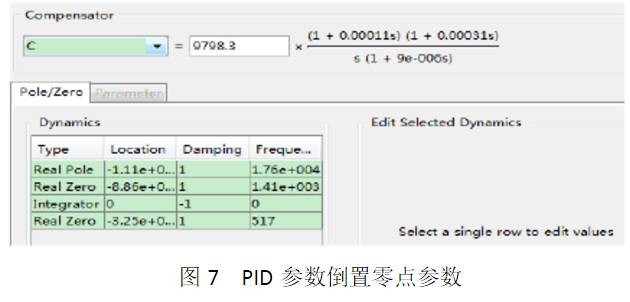 加入PID之后,低频段的增益抬高,稳态误差减小,如图8 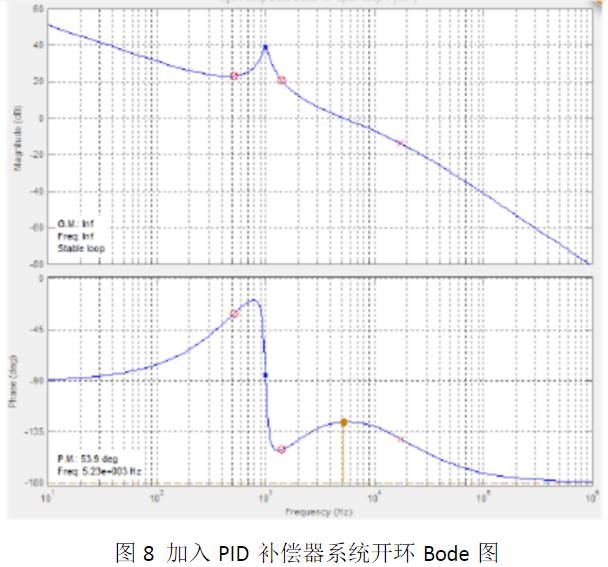 假设补偿网络中C1=1μF,依据前面的方法计算后,选用R1=94,R2=393,R3=12,C2=0.8uF。 由图8可以看出,补偿后,fc=5KHz,相位裕度ψm=52,高频段f>fp,补偿后的系统回路增益在fc处提升至0dB,且以-40dB/dec的斜率下降,能够有效地抑制高频干扰。 系统仿真 图9为PID补偿的Buck变化器系统Psim仿真图 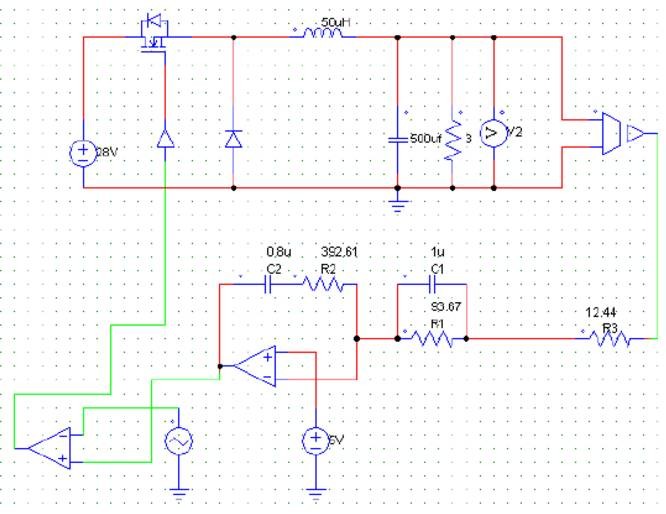 图9 PID补偿的Buck变化器系统Psim仿真图 变换器仿真结果如图10所示 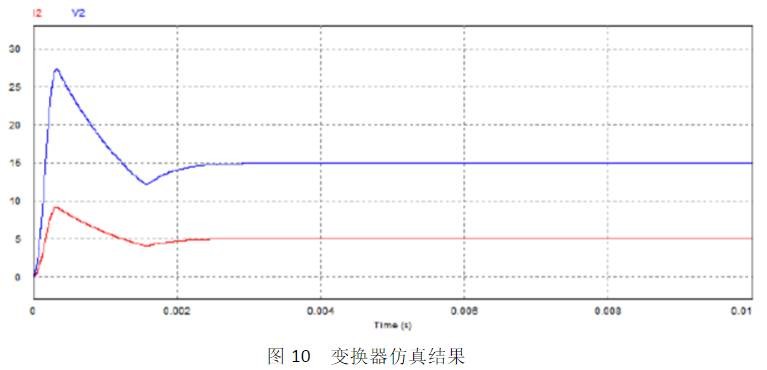 验证加入扰动影响 如图11,系统在0.005ms时加一个10%的电流扰动,即并联一个约30欧姆的电阻;在0.007ms时加一个2V的电压扰动。 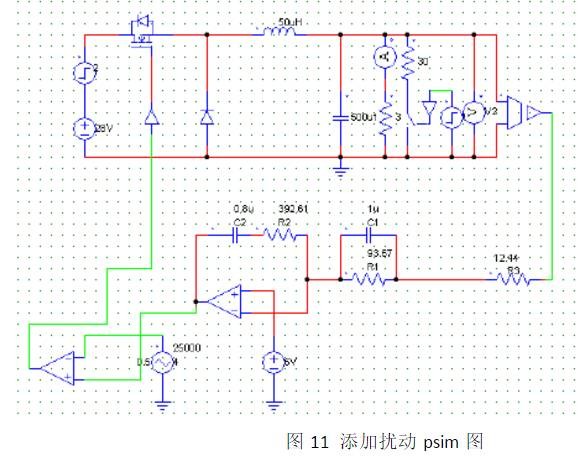 仿真结果: 如果系统在突加10%负载电流扰动时,输出电压约有0.04V的波动,恢复时间仅需100μs; 突加2V电压扰动时,输出电压约有0.1V的波动,恢复时间仅需1ms; 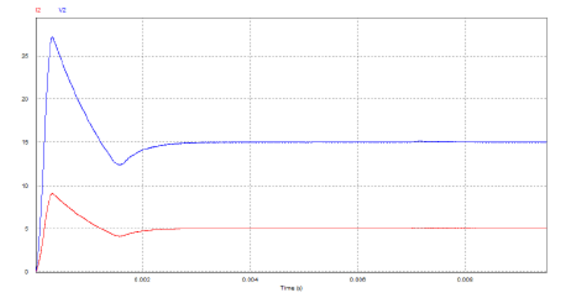 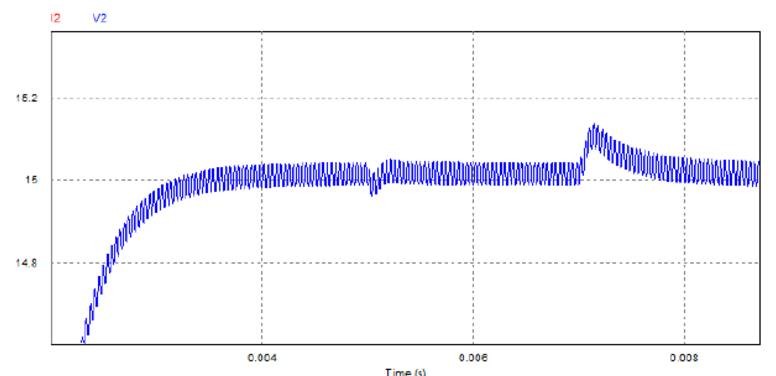 因此,我们可以知道采用PID补偿的变换器具有良好的动态响应和控制精度。
|






 NB300、350、380维修手册
NB300、350、380维修手册 2025年职能部门月考核细则(医学工程部)
2025年职能部门月考核细则(医学工程部)




 浙公网安备 33010402001000号
浙公网安备 33010402001000号