
|
摘要 ■理解电源控制器 ■控制器的线性区设计 ■控制器的非线性区设计 ■控制器的饱和区设计 理解电源控制器 理解开关电源的非线性性质 ■开关电源是一个反馈环路,但这反馈环路有两点非常独特的性质: 环路中的转换器为一个非线性模块,即使使用了开关周期评价的方法,将 开关切换等价成了线性平均,其依然不是一个线性模块; 这个问题导致了开关电源的2个特点:一是非线性,二是存在开关噪声。 后面会详细的讨论这2个特点。 系统会饱和,严格来说,这并不是开关电源独有的问题,但是开关电源的 饱和会有灾难性的后果,因此必须仔细的避开饱和区域。 比如电感电流过大后,会导致磁芯饱和,其结果是灾难性的,为了避开这个饱和 区域,必须对电感电流进行检测,一旦进入危险区,立即复位转换器。 深入理解开关电源的设计 ■一提到环路,很多人会条件反射的运用反馈,自控等理论来分析和设 计,但对开关电源来说不行,因为开关电源中的各个模块都有其非线 性的一面。 下图示出了转换器可能会位于的3个区域,为了方便,将非饱和区直接命名 为非线性区。 转换器如果处于饱和区,转换器会损坏,因此,必须禁止进入此区域,一个合理 的做法是在非线性区内临近饱和区的区域设置警告区域,一旦进入,立即重启转 换器。 非线性区域内的线性区是通过小信号等效得到的,需要控制器提供合理的偏置, 并且限制变量变化的幅度,才能使其能等效成线性区。 换一个角度理解开关电源 ■当开关电源处于稳态时,此时如果环路的变量的变化符合小信号假设, 那么可以认为系统处于线性区,此时可以利用线性系统的方法来设计。 ■当开关电源上电时,或者虽然在稳态,但环路变量的变化很大,不符 合小信号假设,那么此时系统处于非线性区,此时不能直接利用线性 系统的方法来设计。 非线性系统的设计方法不像线性系统那么成熟,流派很多,也不容易理解, 在本文档中将针对电源系统进行讨论。 ■无论如何,系统都不能进入饱和区,因此,饱和区的设计实际上就是 检测转换器中的关键变量,当变量值超阈值时,自动复位转换器。 控制器设计基本流程 ■控制器设计是整个开关电源设计的核心,下图示出了控制器设计的3个 任务:饱和区域处理,大信号设计和小信号设计。 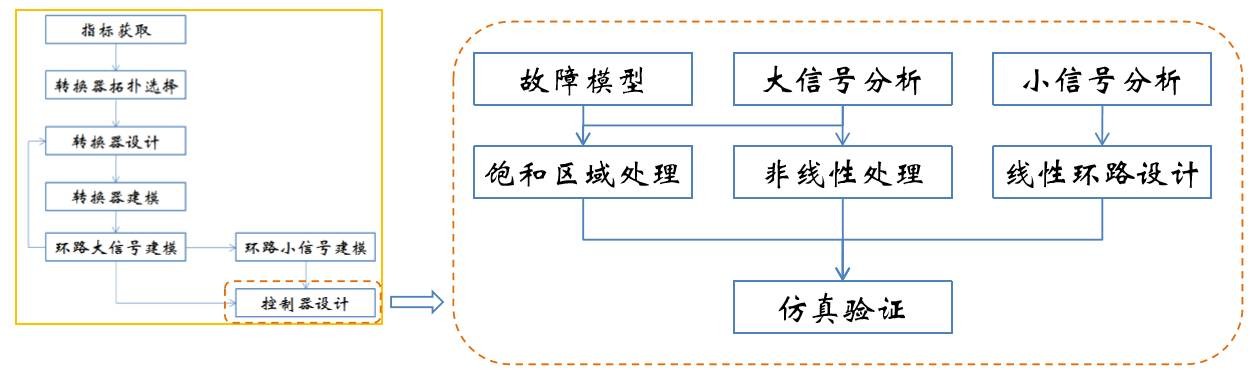 控制器的结构 ■根据前面的分析,可知控制器实际上包含3部分: DSP:当转换器处于线性区时,激活这部分工作; Nonlinear Ctrl:当转换器处于非线性区时,激活这部分工作,DSP将不响应 环路误差,完全听从于NLC; Guard:当转换器处于警告区时,激活这部分工作,完全接管DSP和PXM。 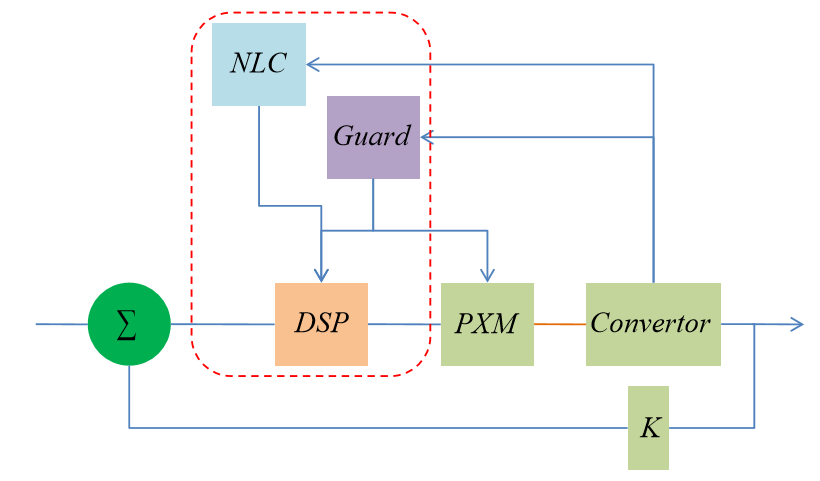 数字电源控制器的设计 ■从前面的控制器结构可以看到,使用数字电路设计这一部分是非常方 便的。 数字电路的设计三要素:输入,输出,功能。 用前面的控制器结构模型,可以非常清晰的定义出这三要素。 ■如果使用模拟电路,势必难以割裂这三个部分,控制器的设计将变成 一个非常依赖经验和技巧的任务。 数字电源控制器的设计 ■目前找到的书籍和资料都只强调控制器在线性区工作的设计,而不强 调非线性区的设计。 ■这个误区的原因可能在于以往的控制器都用模拟电路实现,而模拟电 路是很难实现丰富的非线性控制的。如今使用数字控制后,非线性区 控制可以做得很好。 控制器的线性区设计 环路建模工具 ■环路建模工具就是matlab,通常的做法是建立M文件,然后在M文件中 输入各个模块的传递函数,利用matlab进行相乘(串联),连续转离 散,离散转离散等操作,得到高级环路模型。 高级环路模型是指将环路简化为几个基本模块后的结构,这些结构能被 matlab工具箱sisotool所支持。 下图为sisotool支持的所有结构: 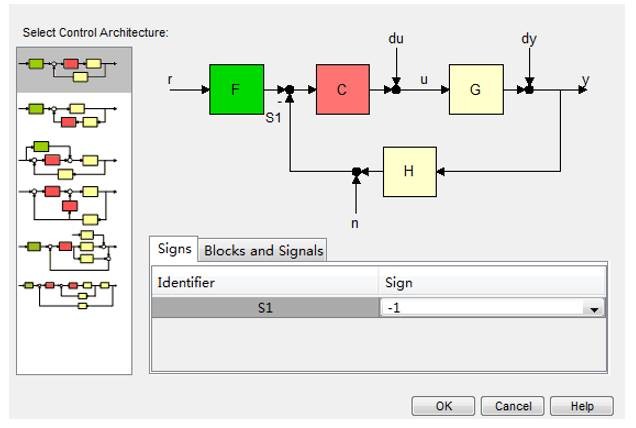 DSP设计工具 ■DSP参数确定可以使用matlab自带的sisotool工具,这个工具能够根据 要求得到传递函数。得到传递函数后,再将传递函数化为PID和LPF系 数。 ■因为我们采用的是平台化的控制方法,因此可以将传递函数通过特定 的公式转成PID和LPF系数。 电压控制环路 ■画出整个环路的模块,如下图: 其中K表示输出电压反馈时的缩放系数。 PWM和Convertor的本质可以理解为一个DA,或者将PWM视为DA,将 convertor视为输入模拟量(0-100%),输出模拟电压的一个装置。 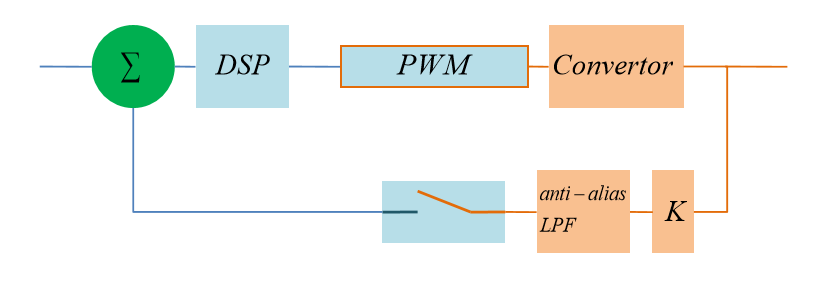 电压控制环路离散模型 ■为了使用sisotool,将电压控制环路画成如下的形式。 环路设计的工作就是使用Sisotool在已知G和H的情况下求C 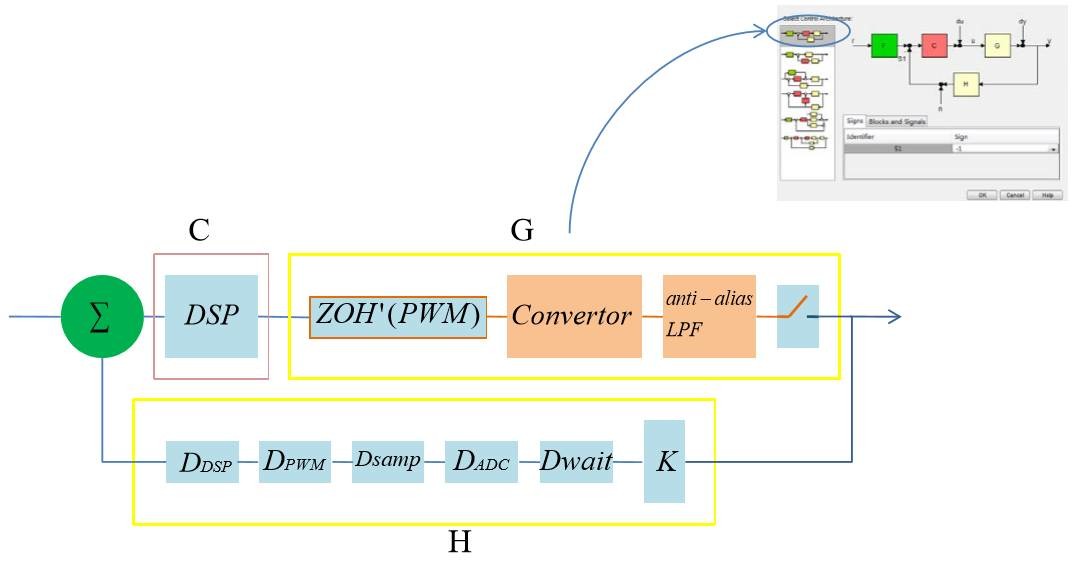 采样频率和固有延 ■要将模拟模块处理成离散模块,首先要确定的就是采样频率,在这个 环路里面,唯一能作为标准采样频率的就是开关管的切换频率fs。 PWM的周期也为Ts。 固定采样频率后,所有的延迟都只能是Ts的整数倍。 ■此系统为LTI系统,可以将所有的延迟集中到一起,此时如果延迟不是 一个整Ts,必须人为加上延迟,凑够Ts的整数倍。 将延迟分离后,所有的模型都视为和其传递函数表达式是完全相同的: DSP,输入数据,0延迟立即输出数据,输入X[k-1],X[k],立即得到Y[k]。 忽略ADC的量化误差后,ADC变成一个理想采样开关+ZOH,这个ZOH制造了1/2 倍转换时间的延迟。 ★注意ADC的转换延迟并不是等于转换时间,而是等于1/2转换时间。  PWM和转换器的延迟 ■PWM和转换器合力完成如下工作: 在周期的起始,PWM接收占空比信号D,输出持续一个周期的PWM波形, 在这个周期的结束点,输出电压反映了上一个周期的电压+当前周期占空比 的影响。 ■由此可见,如果在周期的末尾采样输出电压的话,PWM和转换器合起 来有1个周期的延迟。 有些资料上将PWM直接等效为一个ZOH,这样是存在问题的,因为ZOH只 有半个周期的延迟,这样处理的前提是要求ADC在Ts/2的位置采样,并假 设Ts/2处采样的值等于周期平均值。 这个问题的根源是没有考虑开关电源的特殊性,而是将开关电源的等效模型当成 真实模型来用了,认为PWM+转换器是一个输入模拟量d,输出稳定电压V的装置。 环路延迟的处理 ■前面讨论过,转换器的输出电压在一个周期内是变换的,因此,ADC 在何时采样就很关键了,假设电压在一个周期内是逐渐稳定的,那么 理想的采样点是上一个占空比D刚刚结束,下一个占空比还未更新时。 ■按照这个思路,环路延迟(包括PWM的ZOH’等)=2Ts 理想无延迟状况是采样V[k-],产生D[k],决定V[k+],现在是采样V[k-2], 决定V[k]。 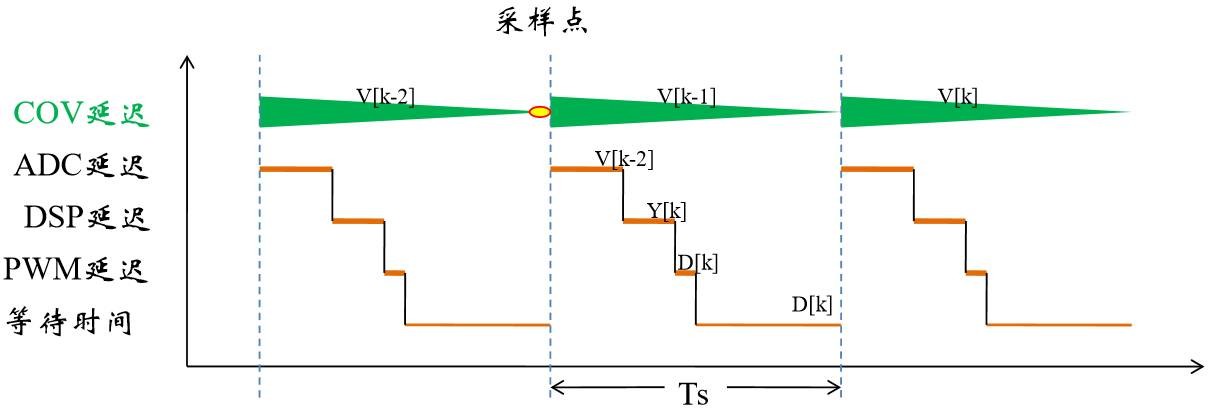 提高输出电压采样精度 ■前面是假设输出电压在周期结束时最精确,因而在周期末尾进行采样, 这并不是最好的方式,最理想的方式是在整个周期都进行采样,然后 进行平均,得到整个周期的平均电压。 这个方法在理论上是可行的,但实际操作时会面临一个问题是ADC本身的 量化误差可能会超过单个周期内输出电压的波动,使得这种方法毫无意义。 ■作为一种折中,需要根据转换器的拓扑,研究转换器在何时的输出电 压接近其周期平均电压。 忽略输出电压单周期纹波 ■如果忽略输出电压单周期纹波,那么采样时刻的选取就变简单了,一 个合适的采样时刻是采样后,完成后续的所有工作,恰好更新下一周 期占空比 按照这种方式,环路延迟将减少到Ts,而不是2Ts。 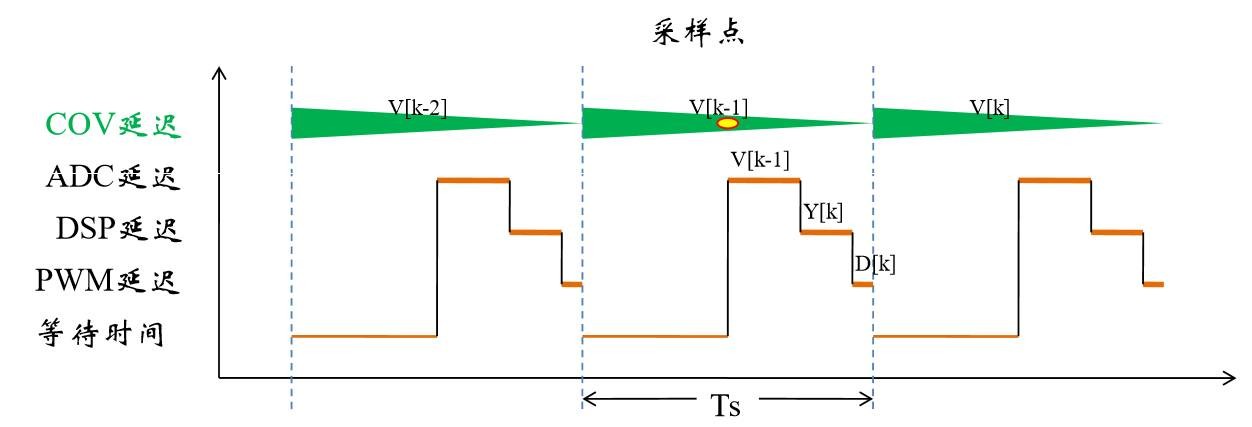 离散化方法的选择 ■由前面的分析可知,整个环路的延迟等于,2Ts的延迟,加上模块传递 函数自带的相位改变。 比如传递函数分母出现s或1-z-1,意味着相位要推迟。 ■但是光考虑这些还不够,还要注意到,在将连续传递函数进行离散化 的时候,离散化这个过程可能会引入延迟。 如果选择加零阶保持器法,那么会引入半个周期的延迟; 如果选择双线性变换法,那么不会引入延迟,因此,在充分考虑了环路延 迟后,应该选择这种离散化方法,以免得到的离散传递函数不能表达真实 的情况。 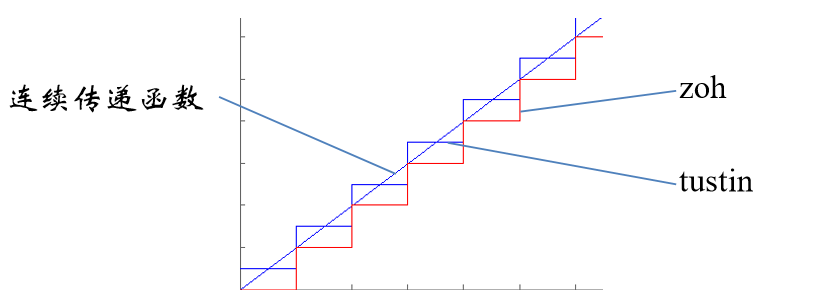 考虑延迟后的环路模型 ■下图示出了延迟为Ts时的环路模型: 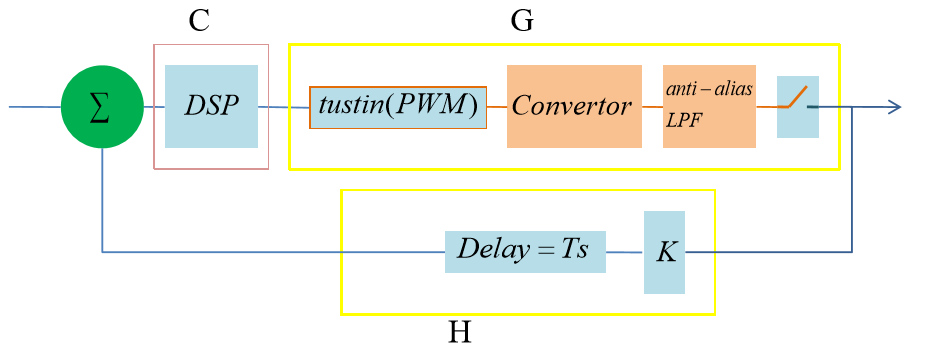 环路延迟的的影响 ■从之前的分析可以看到,如果环路有Ts的固有延迟,这Ts的固有延迟 在f=fs处制造了360度的相位延迟,环路稳定性将下降。 ■因此,相位交点必须足够低,远离fs处,这样,这Ts的影响将降低, 按照前面的经验,100K的fs,将增益交点定在10K,相位交点也在10K 附近,离100K足够远,可以消除这个延迟的影响。 计算H的传递函数 ■H的传递函数很简单: Hk=K; Hd=z-1; H=Hk*Hd; 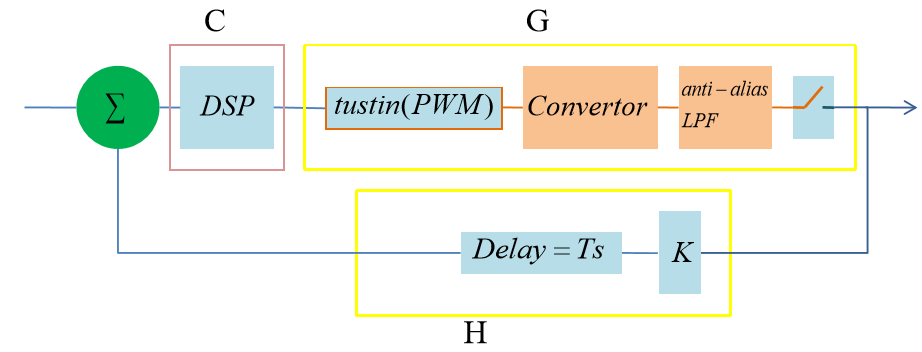 计算G的传递函数 ■G的传递函数如下: Gpwm=1/VM; Gcov,Gaalpf; G=Gpwm*Gcov*Gaalpf; ■将G转成连续传递函数:Gd=c2d(G, 1e-5,’tustin’) 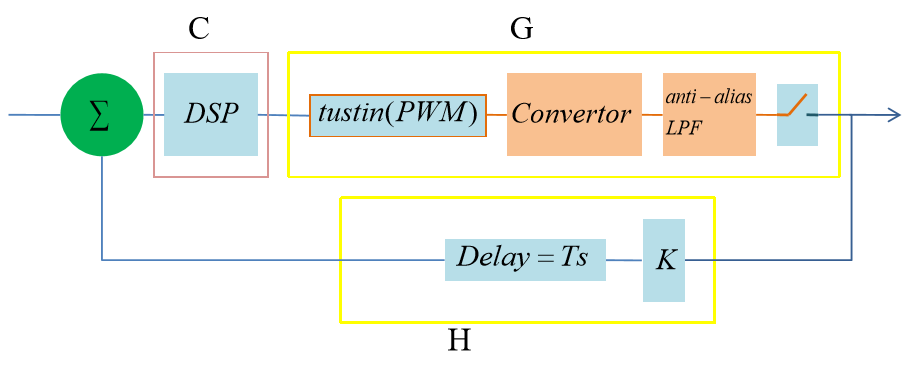 最新评论论坛新帖更多>医工工具 |






 NB300、350、380维修手册
NB300、350、380维修手册 2025年职能部门月考核细则(医学工程部)
2025年职能部门月考核细则(医学工程部)




 浙公网安备 33010402001000号
浙公网安备 33010402001000号