
|
开关电源从理论上来说,是个强病态系统,但经过工程化近似,好多问题可以运用经典控制理论来解决。而经典控制理论里面的PID调节,有个脍炙人口,大家耳熟能详的口诀,就是著名的PID调节口诀: 参数整定寻最佳,从小到大顺序查; 先是比例后积分,最后才把微分加; 曲线振荡很频繁,比例度盘要放大; 曲线漂浮绕大弯,比例度盘往小扳; 曲线偏离回复慢,积分时间往下降; 曲线波动周期长,积分时间再加长; 曲线振荡变很快,先把微分降下来; 动差大来波动慢,微分时间要加长; 联想曲线两个波,前高后低4比1; 一看二调多分析,调节质量不会低。 这是一条所有学过《自动控制理论》的人,都能熟记于心的口诀。小弟不才,原与各位共同讨论这个话题。 PID调节,何为P,何为I,何为D?何为零点,何为极点及它们在系统中的影响,让我们一步步展开~ 通过建模,得到系统的传递函数之后,对系统外施一给定信号,系统状态和输出在时间域上的响应,决定于系统本身的参数结构,以及系统初始状态和给定输入信号的形式。通过对时间域响应的研究来评价系统性能,即为控制系统的时域分析。具体来说,是根据闭环系统的零极点在复平面上位置的分布来分析系统的性能,故又称为复频域分析。 为了时域研究方便,常对线性系统施加典型信号,常用的典型信号有下面五种: (1)、单位阶跃函数:Y(t)=Heaviside(t),Y(s)=1/s。 (2)、单位斜坡函数(等速度函数):Y(t)=t,Y(s)=1/s^2。 (3)、单位抛物线函数(等加速度函数):Y(t)=1/2*t^2,Y(s)=1/s^3。 (4)、单位冲激函数:Y(t)=dirac(t),Y(s)=1。 (5)、正弦函数:Y(t)=sin(w*t),Y(s)=w/(s^2+w^2),常用作频域分析时的典型输入信号。 对于同一系统,施加不同形式的输入信号,得到的输出响应是不同的。线性控制系统的特点是,系统性能只由系统本身的结构参数决定,亦即不同形式输入得到的不同输出响应所表征的系统性能是唯一一致的。 这个通常是系统的闭环传递函数,时域分析就是以它为研究对象的。 2、零、极点形式  经典控制理论的第三种分析方法频域分析法,就是以这种表达形式为研究对象的。 世界是现实世界,且是个能量守恒的世界,物体的运动,遵循着各种各样的规律,将这些规律抽象出来,就可以用数学来描述物体的运动规律。这些运动规律,抽取其典型,就形成了各种各样的典型环节,将典型环节组合起来,就形成了各种各样的传递函数表现形式,也形成了各式各样的物体运动规律。 最常见的典型环节如下图所示(因论坛无公式编辑功能,故只能在word上录入截图) 第七种典型环节的极点在s平面的右半平面,这种环节是不稳定的,称为不稳定环节。传递函数,无外乎是这些典型环节的组合~ 面两个帖子的内容,在任何一本自动控制理论书籍里都能找到,之所以把它们贴出来,是因为它们太重要了。这些组成了时域分析法的基础元素。基础内容更新完毕,可以展开进一步的分析。 比如,我们为什么把阶跃信号作为最典型的时域输入信号呢?阶跃响应,为何可以同时表现系统的动态特性和稳态特性呢? 在t趋于无穷大 时,该表达式终值应趋于零。 只有,所有的特征方程的根 实部全部为负,该表达式终值才会趋于零。 所以,可以根据通解或特征方程的根来分析系统的稳定性。 将上面的非齐次微分方程进行拉氏变换,考虑到初始状态,可以得到下列拉氏表达式,其为两项之和:  将上式再拉氏反变换回去,可得到下式,依然为两项之和,并且与前式的两项依次对应: 将上式再拉氏反变换回去,可得到下式,依然为两项之和,并且与前式的两项依次对应: 这个即是时域响应表达式。 这个即是时域响应表达式。 上式右侧第2项仅由t=0时系统输出与输入的初始条件决定,而与t>0以后的输入R(t)无关,通常称为零输入响应,当初始状态为零时这一项为零。  上式即为我们耳熟能详的传递函数表达式。由此可见,传递函数时域分析法研究的是系统的零状态响应。 上式即为我们耳熟能详的传递函数表达式。由此可见,传递函数时域分析法研究的是系统的零状态响应。阶跃响应,何以可以同时表现系统的动态特性和稳态特性? 我们为何将 阶跃信号作为典型输入信号? 决非偶然,在数学上的解释慢慢清晰 阶跃响应,何以可以同时表现系统的动态特性和稳态特性? 我们为何将 阶跃信号作为典型输入信号? 假设输入信号为R(t),它的拉氏变换为R(s),系统闭环传递函数为G(s),则系统的输出信号C(s)=R(s)*G(s)。 将R(S)分解为R(S)=P(s)/Q(s),G(s)=N(s)/D(s), 则C(s)=R(s)*G(s)可以表示成  上式是系统响应的拉氏表达,根据留数定理将其进行部分分式展开,然后取拉氏逆变换,便得到时域响应表达式。  其中,Si为传递函数G(s)的极点,Sk为输入象函数R(s)的极点,均为互异极点。 根据复变函数留数定理,将上式进行拉普拉斯反变换,即得到C(s)在时域上的表达C(t),也就是系统时域响应表达式。  Ai、Bk为待定常量,其值与系统的结构参量及输入有关。 Ai、Bk为待定常量,其值与系统的结构参量及输入有关。如果仅仅靠手工进行展开,简直是个噩梦,好在有个软件叫matlab,先上个图: 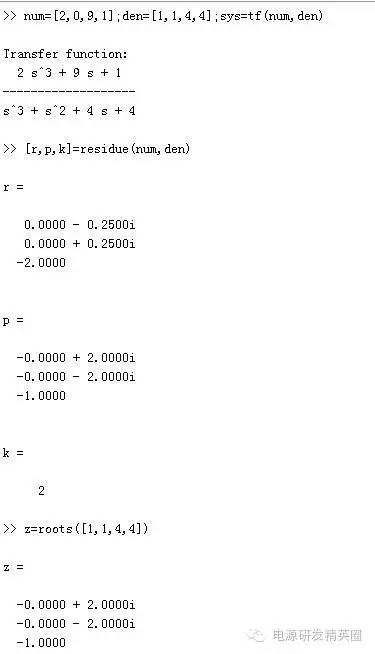 解释下,上面这个图的含义:对一个传递函数进行部分分式分解。 num和den分别是传递函数分子分母多项式的系数矩阵,r是留数,p是求得的极点,k是余下项s的系数,传递函数一般都是分子的阶次小于分母(这叫物理可实现形式)。 根据运算的结果,可将传递函数展开成下式: G(s)=2-j0.25/(s-2j)+j0.25/(s+2j)-2/(s+1) 上式可以很轻松的拉氏逆变换了,即得到时域表达。 z=roots([1,1,4,4])表示求解f(x)=X^4+X^3+4*X^2+4=0的解,也就是传递函数分母的特征根,可见,得到的特征根矩阵Z矩阵和留数计算里得到的p矩阵,是一致的。 还有两项公式,先看第一项:  这个Sk包含的是输入象函数的极点,如果Sk=0,那么这项就是个实数,而Sk=0,对应的输入信号就是阶跃,这个可以认为是系统的稳态响应。 再来看第二项:  这个项,是由传递函数本身的极点组成的线性叠加,只有这里的Si具有负实部,这个项的终值才会趋于零,系统才会稳定。 这个需要注意到,上式成立有个前提:就是C(s)的所有特征根,都是互异的。如果存在重根因式分解,就不会是上式。有点复杂,有兴趣的可以自己推导一下。 用阶跃信号做为最典型输入的数学本质: 1、如果是冲激信号,这个式子就为零,不含有稳态分量; 2、如果是斜坡信号或者抛物线信号,这个式子的时域表达会随时间而变,同时包含了稳态和暂态信号。 3、如果是阶跃信号,这个式子就是个实数,只含有稳态分量。 这样的话,就很好的分离了时域响应的稳态和暂态,分析起来更加方便。 由此可见,系统本身结构的闭环传递函数的极点,线性组合形成了暂态。 实数极点形成的暂态,是单调的~ 那么复数极点形成的暂态是怎样的呢?好在复数极点都是共轭的~ 先来张图,手写的:  假设共轭极点S1=-1/3+3j,S2=-1/3-3J, 那么它们形成的暂态(假设它们的比重系数都为1): 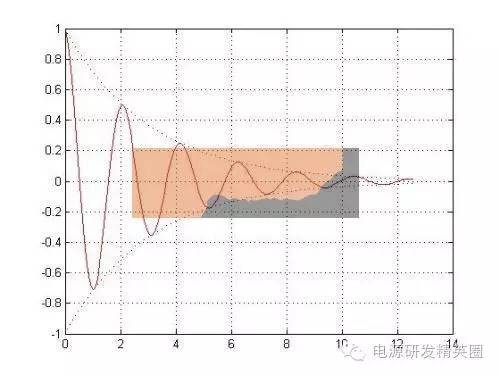 可见,衰减的速度,跟实部有关,震荡的频率,跟虚部有关~ 作者:bode 文章来源:电源网
|






 NB300、350、380维修手册
NB300、350、380维修手册 2025年职能部门月考核细则(医学工程部)
2025年职能部门月考核细则(医学工程部)




 浙公网安备 33010402001000号
浙公网安备 33010402001000号